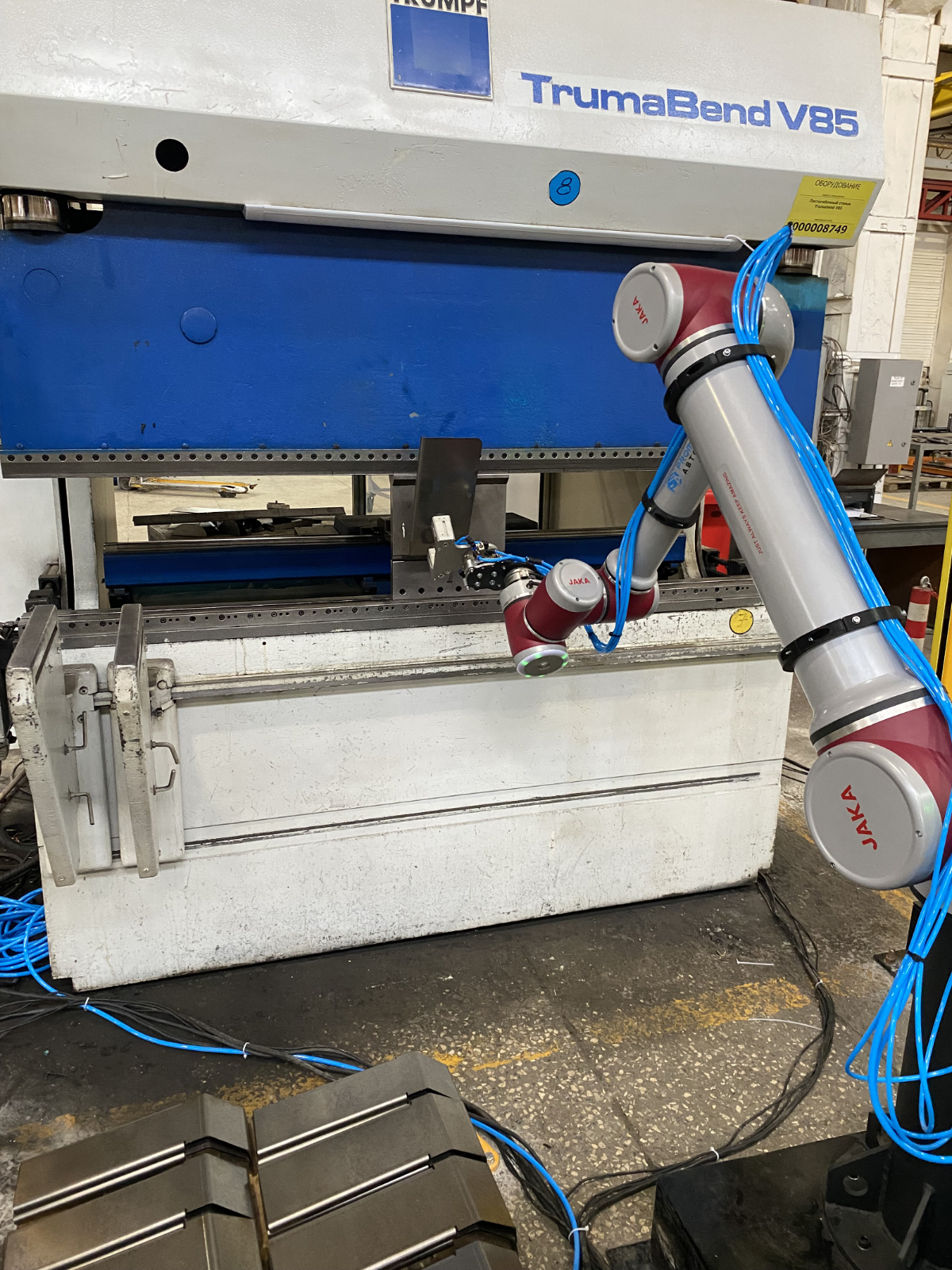
Автоматизация гибочного станка Trumpf TrumaBend V85

В данном проекте используется коллаборативный робот JAKA 16 Pro с грузоподъемностью 16кг и радиусом рабочей зоны 1700мм. Робот поставляется в комплекте с системой быстрой смены захватов и тремя сменными магнитно-вакуумными захватами. Это позволяет работать с широкой номенклатурой деталей.
В рамках проекта была выполнена полная интеграция робота с гибочным станком Trumpf TrumaBend65. В результате робот получает от станка сигналы обратной связи о положении пуансона, скорости подачи, готовности станка к работе и запускает процесс гибки, имитируя нажатие педали. При этом за счет удобного расположения робота и правильного подключения сигналов остается доступным ручной режим гибки.
Робот также оснащен силомоментным датчиком, который позволяет выполнять поиск верхней заготовки в бункере и устанавливать ее до касания с упорами станка.
В процессе внедрения робота были написаны программы для гибки 6 различных типоразмеров деталей. Помимо этого, специалисты предприятия прошли обучение в специализированном учебном классе компании «Промэнерго Автоматика» и уже начали самостоятельно разрабатывать дополнительные программы гибки.

Компания Промэнерго Автоматика является авторизованным партнером Siemens


Компания Промэнерго Автоматика выполняет работы по проектированию, изготовлению, программированию и пуско-наладке автоматизированных систем управления технологическими процессами и систем энергораспределения.

Поддерживаем на складе преобразователи частоты мощностью от 0,4 до 560 кВт




Все самое свежее о семинарах, обучениях, web-тренингах и новостях из мира АСУТП
Не допускается полное или частичное копирование материалов данного сайта без письменного разрешения владельца. Данный сайт использует технологию cookie. Оставаясь на сайте Вы подтверждаете свое согласие с использованием cookie. Правовая информация: Согласие пользователя на обработку персональных данных, Политика конфиденциальности и обработки персональных данных. На сайте указаны розничные цены без НДС. Для получения скидки обращайтесь в отдел продаж.
© ПРОМЭНЕРГО АВТОМАТИКА, 2001—2026. Все права защищены законодательством РФ.
Адрес офиса: Москва, ул. Скотопрогонная, д. 27/26, строение 1
{{ quickBuyNote }}