- Главная
- Статьи и обзоры
- Обзор возможностей SIMATIC Safe Kinematics V2.0 для робототехники
Обзор возможностей SIMATIC Safe Kinematics V2.0 для робототехники
SIMATIC Safe Kinematics V2.0
- Позволяет безопасно контролировать движения кинематической системы в декартовом пространстве для защиты обслуживающего персонала
- Сертифицирован по
- SIL3 (IEC 61508 и IEC62061)
- PLe(ISO 13849-1) в комбинации с SINAMICS до SIL2, PLd - Является платным пакетом опций TIA Portal и STEP7 Safety Advanced
- Предлагается как программа начальной установки для TIA Portal V16 от Update 1
- Предоставляет для каждой доступной кинематической системы собственный, отказобезопасный функциональный блок
- Поддерживается в симуляции через S7-PLCSIM Advanced
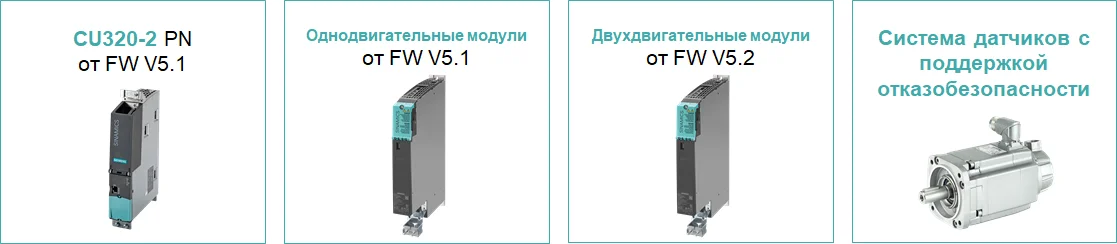
Системные требования
Контроллер SIMATIC:

Приводная система SINAMICS
Поддерживаемые кинематические системы

Системы координат
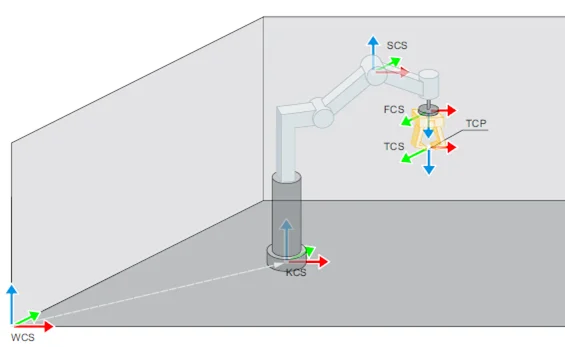
Неподвижные системы координат
Мировая система координат (World coordinate system - WCS)
(X характеризует ширину сцены, ось Y - ее глубину, а ось Z - высоту.)
- Система координат окружения
- Опорная точка для объектов / движений в контролируемом пространстве
Кинематическая система координат (Kinematics coordinate system - KCS)
- Жестко привязанная к кинематике система координат
- Начало отсчета в нулевой точке кинематической системы
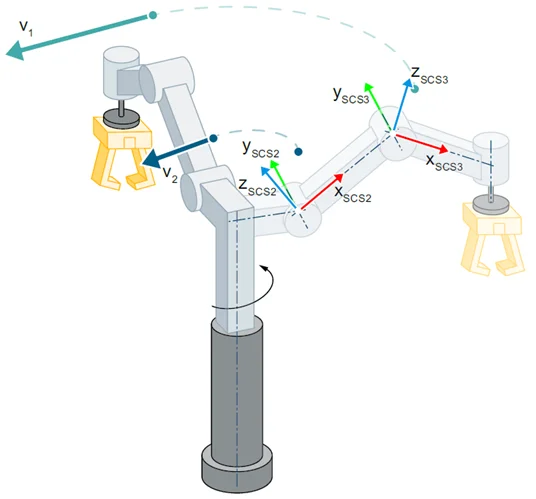
Подвижные системы координат
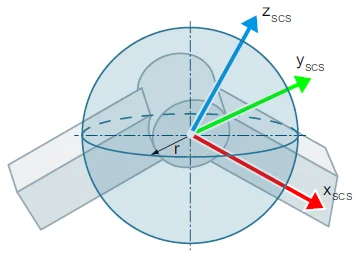
Сегментная система координат (Segment coordinate system - SCS)
- Привязана к подвижным точкам кинематики
Фланцевая система координат (Flange coordinate system - FCS)
- Система координат в держателе инструмента (конечная точка кинематики)
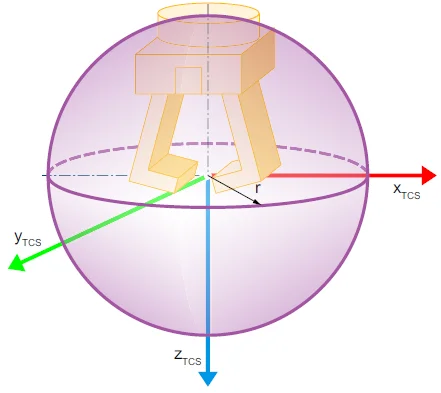
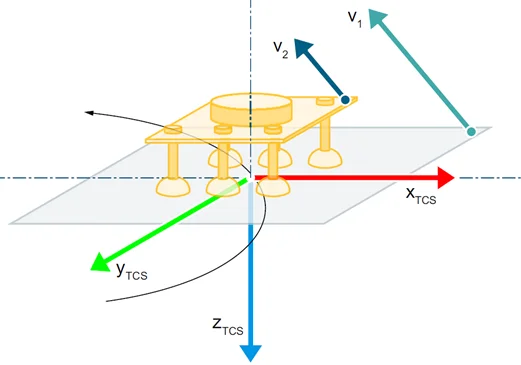
Система координат инструмента ( Tool coordinate system - TCS)
- TCS относится к FCS и определяет центр инструмента (TCP)
Смещения и вращения системы координат
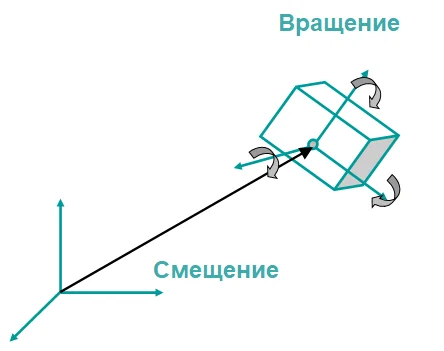
- Вращение: вращение вокруг осей собственной системы координат тела.
- Смещение: перемещение собственной системы координат тела относительно опорной системы координат, например, WCS.
Безопасный контроль зон
Контроль, не выходят ли кинематические зоны из активных рабочих зон или не входят ли они в зоны предупреждения и защиты
- Ограничение области перемещения кинематики
- Контроль зон, куда разрешен доступ для обслуживающего персонала
- Программирование зональных функций обеспечения безопасности
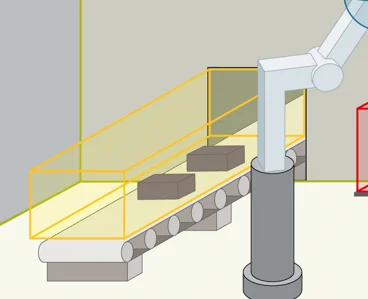
Зоны и геометрия зон
Зоны рабочего пространства описывают окружение кинематической системы (неподвижные в WCS)

Кинематические зоны жестко привязаны к компонентам кинематики и перемещаются вместе с кинематикой
Геометрия зон: моделирование зон с помощью геометрических тел
Важно!
При конфигурировании зон следует учитывать и необходимый тормозной путь кинематики!
Принцип работы
Кинематическая зона выходит из рабочей зоны
- Установка выхода „stop“, если кинематическая зона выходит из рабочей зоны
- Анализ выхода „stop“ и программирование пользовательской реакции останова для кинематики, напр., SS1E для SINAMICS
- Отображение статуса зон на выходе „stopIdSZM“ (только при активном контроле зон)
Кинематическая зона входит в зону предупреждения
- Установка выхода „stopIdSZM“, если кинематическая зона входит в зону предупреждения
- Анализ выхода „stopIdSZM“и программирование пользовательской реакции, например, разрешение области для обслуживающего персонала
Кинематическая зона входит в зону защиты
- Установка выхода „stop“, если кинематическая зона входит в зону защиты
- Анализ выхода „stop“ и программирование пользовательской реакции останова для кинематики, например, SS1E для SINAMICS
Важно!
SIMATIC Safe Kinematics не запускает реакцию останова! Пользователь должен выполнить анализ выхода „stop“ и инициировать подходящую реакцию останова, например, STO, SS1E, SOS для SINAMICS!
Зоны рабочего пространства
Рабочие зоны
Рабочая зона - вся "комната"
Цели:
- Определение рабочих областей, напр., рабочих мест для обслуживающего персонала
- Ограничение пространства для перемещения кинематики, например, с целью уменьшения конструкции и отступов для защитных ограждений
Подробности:
- Число моделируемых рабочих зон: 10
- Активные рабочие зоны при эксплуатации: 1
- Опорная система координат:
мировая система координат (WCS) - Если рабочая зона не активирована, то все пространство для перемещения кинематики считается рабочей областью!
Зоны предупреждения
Цели:
Определение областей, с которыми кинематическая зона может или не может соприкасаться в зависимости от устройств безопасности, например, для контроля зон, в которые может входить обслуживающий персонал
Подробности:
- Число моделируемых зон предупреждения: 10 (вместе с зонами защиты)
- Активные зоны предупреждения при работе: 10
- Опорная система координат: мировая система координат (WCS)
Зоны защиты
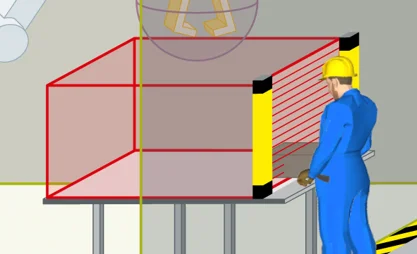
Цель:
Определение областей, которые не должны соприкасаться с кинематической зоной, например, шкафы управления, стены
Подробности:
- Число моделируемых зон защиты: 10 (вместе с зонами предупреждения)
- Активные зоны защиты при работе : 10
- Зоны защиты могут частично выходить за пределы рабочей зоны
- Опорная система координат: мировая система координат (WCS)
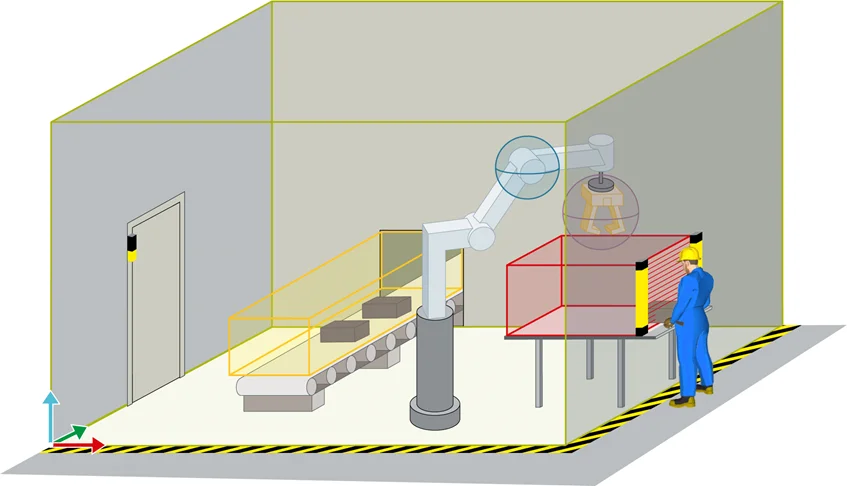
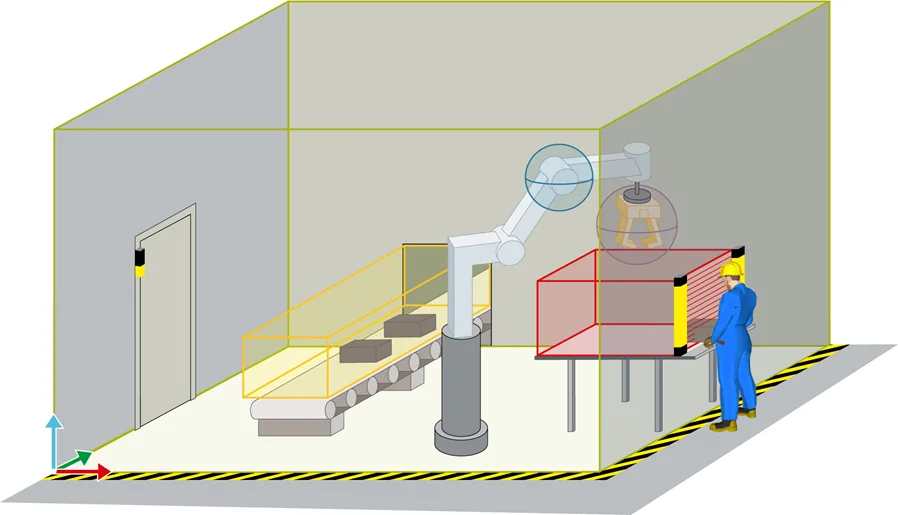
Сегментные зоны и зоны инструмента
- Относятся к частям кинематики, например, шарнирам
- Двигаются вместе с кинематикой
- Учитывают
- пространственное расширение кинематики
- выступающие части, например шланги или механические соединения осей
- размер предполагаемых заготовок для различных инструментов - Должны быть расположены в рабочих зонах
Кинематические зоны
Сегментные зоны
Цель:
Моделирование определенных частей кинематики, напр., шарнирных рук, кабеля
Подробности:
- Число моделируемых сегментных зон: 12
- Активные сегментные зоны при работе: 12
- Опорные системы координат:
- сегментные системы координат (SCS) от 1 до <n>*
- Фланцевая система координат (FCS)
Зоны инструмента
Цель:
Моделирование инструментов, частей инструментов или деталей
Подробности:
- Число моделируемых зон инструмента: 10 на инструмент
- Активные зоны инструмента при работе: 10
- Опорная система координат: система координат инструмента (TCS)
Геометрия зон
- Определение положения нулевой точки зональной системы координат в опорной системе координат
- Для сферы: указание смещения центра сферы
- Для прямоугольного параллелепипеда: указание смещения левого нижнего угла прямоугольного параллелепипеда
- Указание размерности и вращений тела исходя из этой точки
Сфера
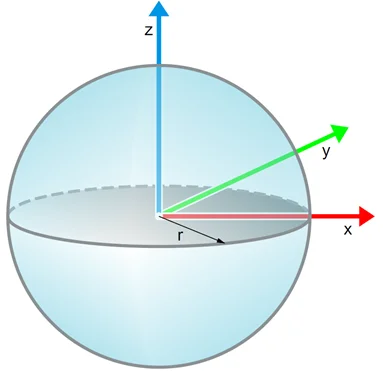
Моделирование сферы из нулевой точки через радиус
Прямоугольный параллелепипед
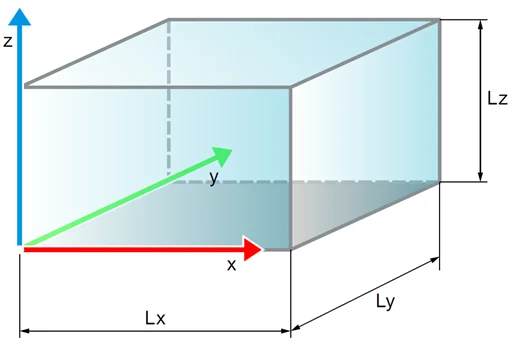
Моделирование прямоугольного параллелепипеда из нулевой точки через длины сторон в направлении x, y и z и через вращения A, B и C
Точка
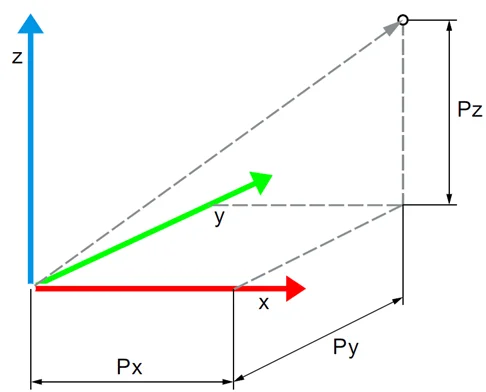
Моделирование точки через положение в опорной системе координат
Безопасный контроль скорости
Мониторинг декартовой скорости в настраиваемых контролируемых точках
Принцип работы
- Установка выхода „stop“, если активное предельное значение скорости будет превышено минимум одной активной контролируемой точкой
- Анализ выхода „stop“ и программирование пользовательской реакции останова для кинематики, напр., SS1E для SINAMICS
- Отображение состояния для контроля скорости на выходе „stopIdSLS“ (только при активном контроле скорости)
- Доступны 4 ступени скорости
- Ступени скорости могут переключаться при работе
- Правило: настройка предельных значений скорости в падающей последовательности: SLS1 > SLS2 > SLS3 > SLS4
- Настраиваемое время задержки между выбором и активацией контроля скорости и при переключении на более низкую предельную скорость
->При активном времени задержки и до включения контроля кинематика может быть замедлена стандартным контроллером движения до скорости ниже (новой) предельной скорости
Контролируемые точки
- Автоматический контроль декартовой скорости на TCP, если активны мониторинг скорости и инструмент
- Возможен контроль дополнительных точек:
- Относящиеся к инструменту контролируемые точки
- Относящиеся к сегменту контролируемые точки
- Нулевые точки сегментных систем координат
- Нулевая точка фланцевой системы координат
- Индивидуальная активация контролируемых точек (точки сегментов, нулевые точки фланцевой и сегментной систем координат) при работе через вход „selectSLSPoints“
- Мониторинг всех контролируемых точек по одному и тому предельному значению скорости
При конфигурировании предельных скоростей следует учитывать и необходимый тормозной путь кинематики! SIMATIC Safe Kinematics не запускает реакцию останова! Пользователь должен выполнить анализ выхода „stop“ и инициировать подходящую реакцию останова, напр., STO, SS1E, SOS для SINAMICS!
Относящиеся к инструменту контролируемые точки
- До 4 свободного определяемый точек на инструмент(опорная система координат: TCS)
- Контроль, если активны мониторинг скорости и инструмент
Пример
Определение двух контролируемых точек в TCS инструмента:
- Точка инструмента 1 на углу детали
- Точка инструмента 2 на углу инструмента
Относящиеся к сегменту контролируемые точки
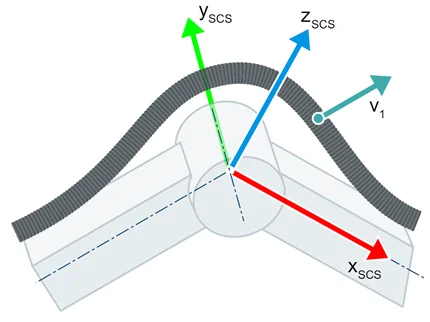
- До 4 свободного определяемый точек на кинематику (опорная система координат: SCS1 до <n> или FCS)
- Контроль, если активен мониторинг скорости и контролируемая точка выбрана с помощью входа „selectSLSPoints“
Пример
Определение контролируемой точки на кабеле сегмента
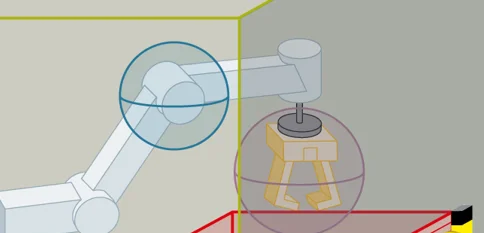
Безопасный контроль ориентации
Контроль ориентации фланца, например, разрешение на обработку детали при установке инструмента под определенным углом к полу (например, вертикально)
Принцип работы
- Установка выхода „stop“, если ориентация фланца нарушает активный конус
- Анализ выхода „stop“ и программирование пользовательской реакции останова для кинематики, напр., SS1E для SINAMICS
- Отображение состояния для контроля SLO на выходе „stopIdSLO“ (только при активном контроле SLO)
Функциональность
- 4 конуса ориентации
- Конус ориентации может переключаться при работе
- Безопасный контроль ориентации фланца только для пользовательской последовательной кинематики
- Определение конуса
- с помощью базисного вектора r в мировой системе координат (WCS)
- и угла допуска ? - Выбор контролируемой оси координат во фланцевой системе координат FCS
Пример
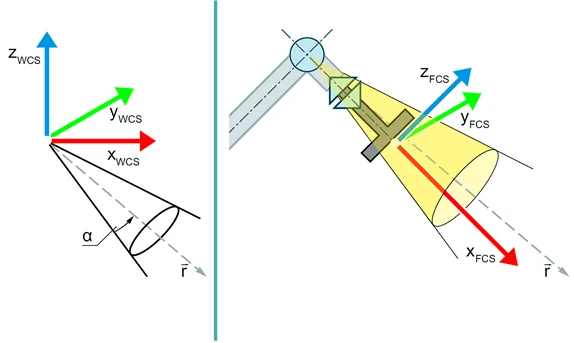
Базисный вектор с углом допуска и осью x в FCS в качестве контролируемой оси координат.
Важно! При конфигурировании предельных скоростей следует учитывать и необходимый тормозной путь кинематики! SIMATIC Safe Kinematics не запускает реакцию останова! Пользователь должен выполнить анализ выхода „stop“ и инициировать подходящую реакцию останова, напр., STO, SS1E, SOS для SINAMICS!
Свободный ход/отвод
Исходная ситуация и необходимые условия
Исходная ситуация
- Требование останова для кинематики, если
- кинематическая зона выходит из рабочей зоны или
- кинематическая зона входит в зону защиты или
- ориентация фланца нарушает активный конус
-> Дальнейшее движение кинематической системы невозможно!
Решение: Свободный ход/отвод
- Отключить требование останова(выход „stop“) через вход „mute"
- Движение кинематики в любом направлении, в том числе и дальше в запретную зону или из рабочей зоны
Необходимые условия
- Выход „stopIdSZM“ или „stopIdSLO“ показывает нарушение зоны или области
- Требование останова кинематики(выход „stop“)
- Кинематика находится в состоянии покоя
Принцип работы (программирование пользователем)
- Выбор SLS через входы „selectSLSPoints“, „selectSLSLimit“ и „enableSLS“
- Непрерывный анализ на предмет нарушения зон или областей посредством выходов „stopIdSZM“ или „stopIdSLO“
- Активация свободного хода/отвода: отключение требования останова (выход „stop“) путем установки входа „mute“
- Ручное перемещение кинематики назад в разрешенную область
- Выключение свободного хода/отвода: сброс входа „mute“, требование останова (выход „stop“) снова активно
- Выход „ackRequested“ установлен, если кинематика находится в разрешенной области
- Квитирование сообщений об ошибках с помощью входа „ack“
Важно!
Для ограничения свободного хода/отвода, необходимо сбросить вход „mute“ по истечении настраиваемого времени!
Взаимодействие с SINAMICS S120
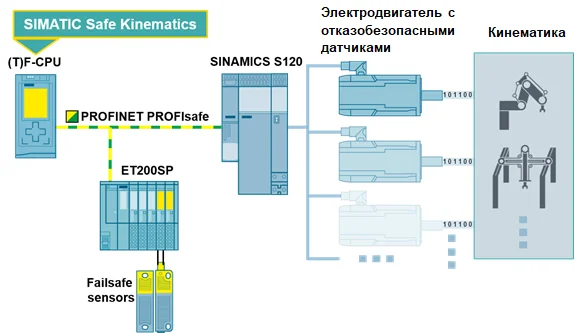
- SINAMICS S120: определение безопасных позиций отдельных осей кинематической системы
- Передача безопасных позиций через PROFIsafe телеграмму 902
на (T)F-CPU - Расчет скоростей и позиций в декартовом пространстве через
SIMATICSafe Kinematics на базе параметров кинематики - Инициирование сконфигурированных пользователем реакций останова при нарушении предельных значений и передача через PROFIsafe на отдельные оси
Миграция V1.0 -> V2.0
- Экспорт параметров кинематики (xmlфайл)с помощью табличного редактора в TIA Portal V15.1
- Обновление TIA проекта до TIA Portal V16 от Update 1
- Удаление всех типов данных, блоков данных, функций и функциональных блоков библиотеки SIMATIC Safe KinematicsV1.0
- Обновление версии FW CPU до V2.8.x и выбор системы обеспечения безопасности версии V2.3
- Установка SIMATIC Safe KinematicsV2.0
- Вставка и подсоединение соответствующих блоков из библиотеки V2.0
- Импорт параметров кинематики (xml файл)
Компания Промэнерго Автоматика является авторизованным партнером Siemens


Компания Промэнерго Автоматика выполняет работы по проектированию, изготовлению, программированию и пуско-наладке автоматизированных систем управления технологическими процессами и систем энергораспределения.

Поддерживаем на складе преобразователи частоты мощностью от 0,4 до 560 кВт




Все самое свежее о семинарах, обучениях, web-тренингах и новостях из мира АСУТП
Не допускается полное или частичное копирование материалов данного сайта без письменного разрешения владельца. Данный сайт использует технологию cookie. Оставаясь на сайте Вы подтверждаете свое согласие с использованием cookie. Правовая информация: Согласие пользователя на обработку персональных данных, Политика конфиденциальности и обработки персональных данных. На сайте указаны розничные цены без НДС. Для получения скидки обращайтесь в отдел продаж.
© ПРОМЭНЕРГО АВТОМАТИКА, 2001—2026. Все права защищены законодательством РФ.
Адрес офиса: Москва, ул. Скотопрогонная, д. 27/26, строение 1
{{ quickBuyNote }}