- Главная
- Статьи и обзоры
- Обзор контроллера SIMATIC S7-1500T
Обзор контроллера SIMATIC S7-1500T всё что нужно для производственных машин и роботов!

Всем известны основные возможности мощных контроллеров S7-1500, вот некоторые из них:
Высокая производительность
- Высокая производительность и качество продукции благодаря быстрой системной шине и короткому времени реакции
- Точность в микросекундном диапазоне и детерминированная характеристика в функции времени с PROFINET
Простая диагностика
- Быстрое автоматическое обнаружение ошибок на системном и прикладном уровне
- Простая локализация ошибок на месте благодаря расположению светодиодов и каналов на одной линии
Эффективный инжиниринг
Поддержка всех языков программирования МЭК 61131-3 (LAD/FBD, STL, SCL, Graph) и таких языков высокого уровня, как C/C++ (только для CPU 1518(F)-4 PN/DP MFP и CPU1515SP PC2 (F/T/TF) через SIMATIC ODK 1500S)
Кибербезопасность
- Встроенная защита от копирования и защита ноу-хау для безопасного использования интеллектуальной собственности
- Усиленная защита от взлома
Safety Integrated
- Один контроллер для стандартных и отказобезопасных функций
- Многоканальные отказобезопасные модули ввода-вывода с прямой адресацией в системе технических разработок
Новый процессорный модуль S7-1500T с расширенными технологическими функциями
Дополнительные технологические функции управления перемещением доступны с TIA Portal версии 15 и FW версии V2.5

Функции управления перемещением
- Кинематические функции управления кинематическими системами максимально с 4 интерполируемыми осями
- Синхронный редуктор и кулачковый синхронный ход
- С задачей синхронной позиции ведущей и ведомой оси
- Соединение по заданному значению
- Соединение по фактическому значению с экстраполяцией
Встроенные программы для редактирования и просмотра
- Редактор кулачков
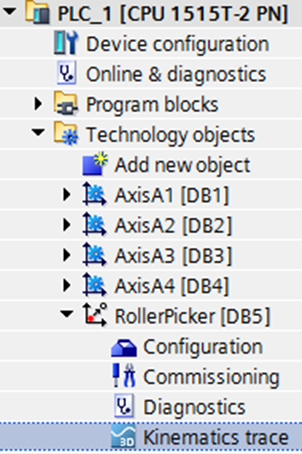
- Конфигуратор для кинематики / трассировка кинематики
Встроенный веб-сервер
- Диагностические страницы для управления перемещением
Доступна реализация и для SIMATIC ET200SP на CPU 1515SP PC2 T/TF

Основная функциональность:
- Встроенная операционная система Windows, полная версия
- Кинематика максимально с 4 интерполируемыми осями - Простое программирование, например, набивных автоматов, сборочных устройств и манипуляторов на основе PLCopen
- SIMATIC ODK 1500S (ODK - Open Development Kit) - интеграция программ C++ , вычисление алгоритмов MATLAB, инструментарий и примеры для решения задач автоматизации
- Отказобезопасный CPU с расширенной функциональностью управления перемещением - задачи автоматизации, управления перемещением и безопасности в одном процессоре
Важный момент расчёт загрузки процессора.
Таблица распределения функциональности в линейке CPU S7-1500/S7-1500T. ТО - это технологические объекты на основе которых рассчитывается загрузка процессора и его возможности для управления.
В таблице они указаны в двух последних строках.
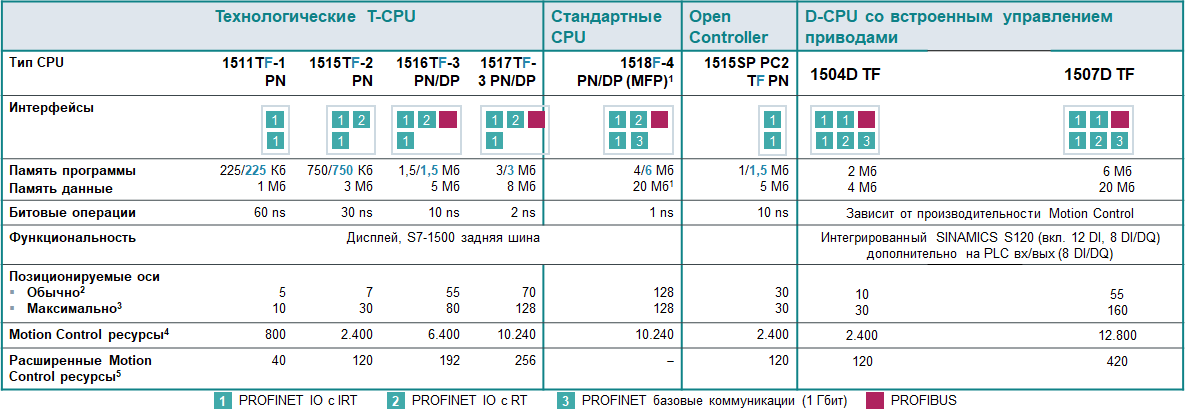
При расчете необходимой производительности и применимости производительности необходимо учесть ограничения и рассчитать затрачиваемые технологические объекты обычные и расширенные!
- 50 Мб доп. для C/C++ (PLC-RT)+500 Мб для C/C++ прилож. (RT/прилож.)
- При 4 ms Servo/IPO цикле и 35 % загрузке CPUфункциями Motion Control
- Другие технологические объекты не используются
- Ресурсы для технологических объектов Motion Control: управляемая по скорости ось = 40 | Позиционируемая ось = 80 | Синхронная ось= 160 | Кулачок = 20 | Кулачковая траектория = 160 | Измерительный вход = 40
- Ресурсы для расширенных технологических объектов Motion Control : Кулачок = 2 | Кинематические объекты= 30 | Ведущая прокси ось = 3
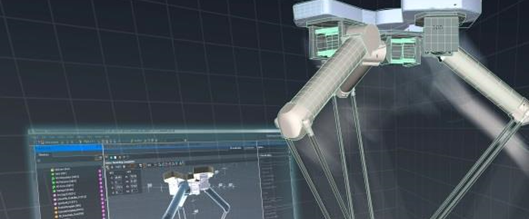
SIMATIC S7-1500 T-CPU Технологический объект "Кинематика"
Что такое кинематическая система?
Кинематическими системами называют свободно программируемые механические системы, в которых несколько механически соединенных друг с другом осей определяют движение рабочей точки.
Использование
- Укладка на поддоны, выгрузка и загрузка
- Сборочные операции
- Последовательный монтаж
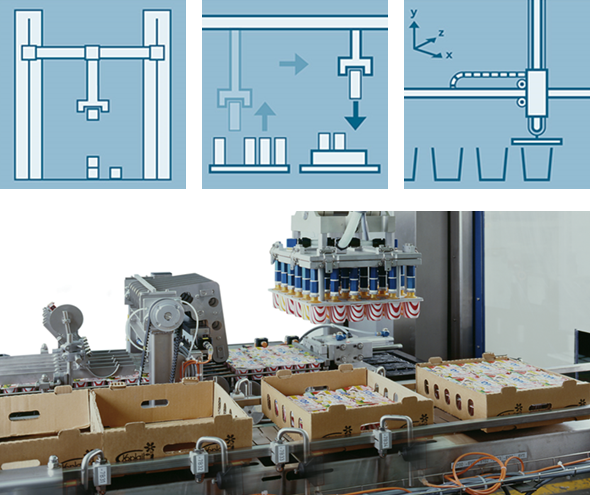
Особенность: кинематические функции в TIA Portal
- Готовые кинематические системы - эффективное программирование и автоматизация типовых кинематических систем (например, декартов портал, портал с захватом, дельта-робот, SCARA, манипулятор, трипод, цилиндрический робот)
- Определяемая пользователем кинематическая трансформация - простая интеграция собственных кинематических систем
- Функциональные
- ласно PLCopen - программирование кинематических функций в привычной среде PLC
- До 4 интерполируемых осе
- блоки согй - простое программирование движения X, Y, Z и ориентации инструмента
- Контроль рабочих зон - предотвращение столкновений между элементами кинематической системы и компонентами станка
- Конфигурирование с графической поддержкой - интуитивное параметрирование кинематики, систем координат, инструментов и зон
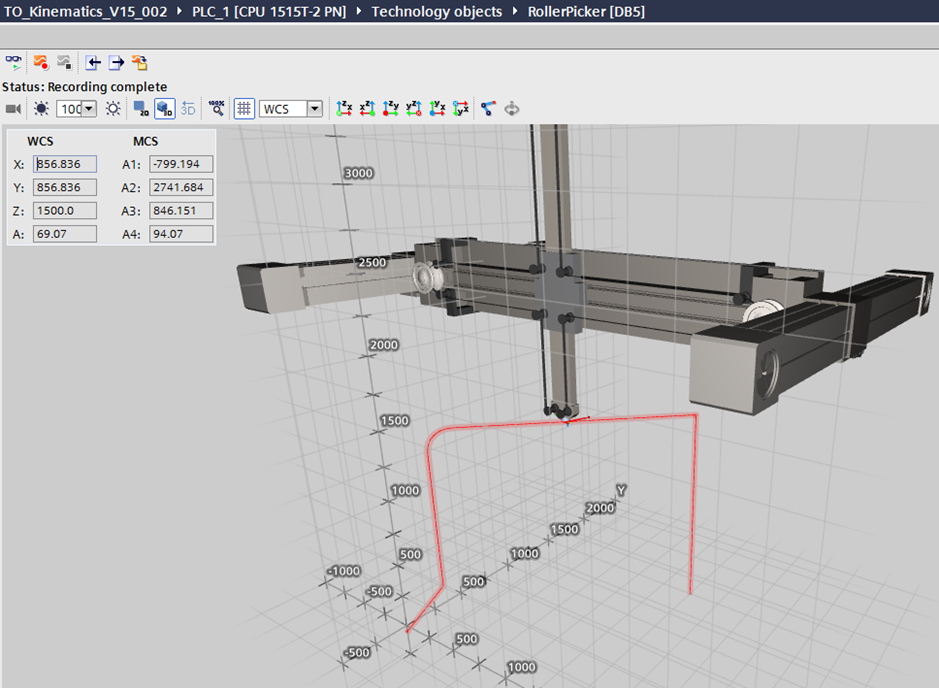
- Трассировка кинематики - диагностика движения с помощью 3D визуализации с трассировкой
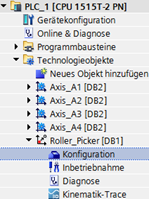
Очень удобные предустановленные кинематические схемы - требуется только настройка!
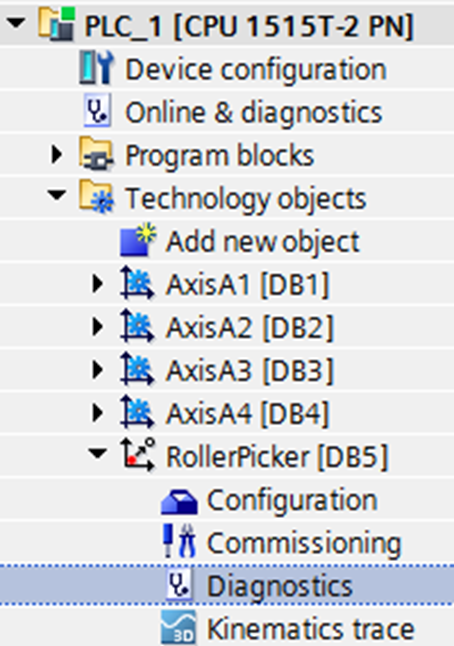
1. TO "Кинематика" может быть создан как новый технологический объект.
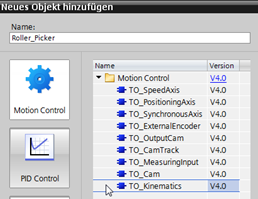
2. Для портала с захватом 3D с осью ориентации потребуется один TO "Кинематика" и четыре позиционируемые оси
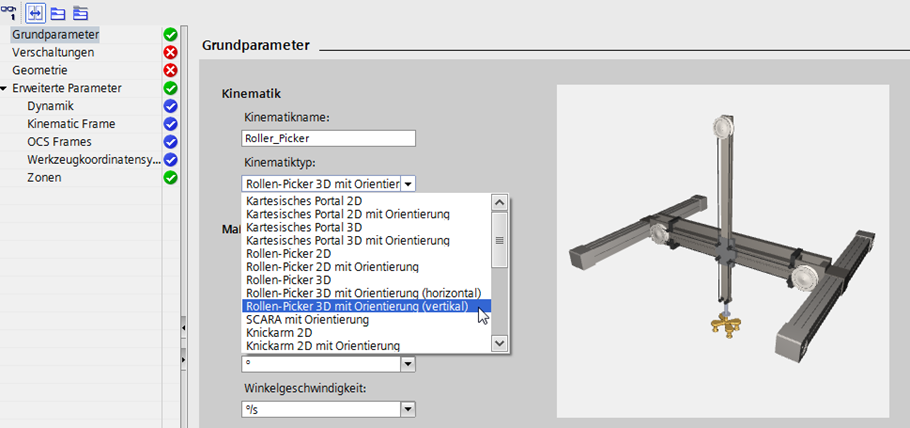
3. В конфигурации выбирается соответствующий тип кинематики.
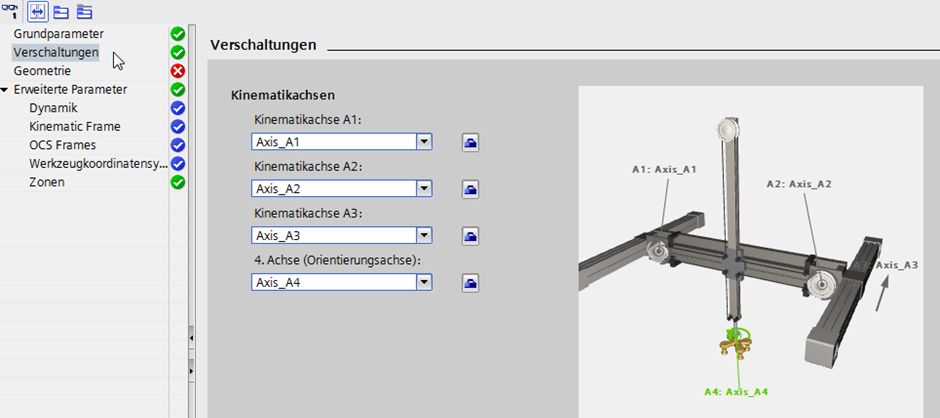
4. Позиционируемые оси согласуются с кинематикой
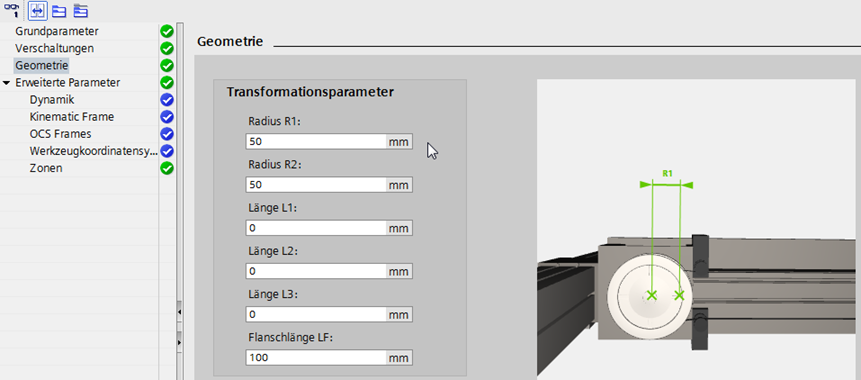
5. Выполняется параметрирование геометрии кинематики.
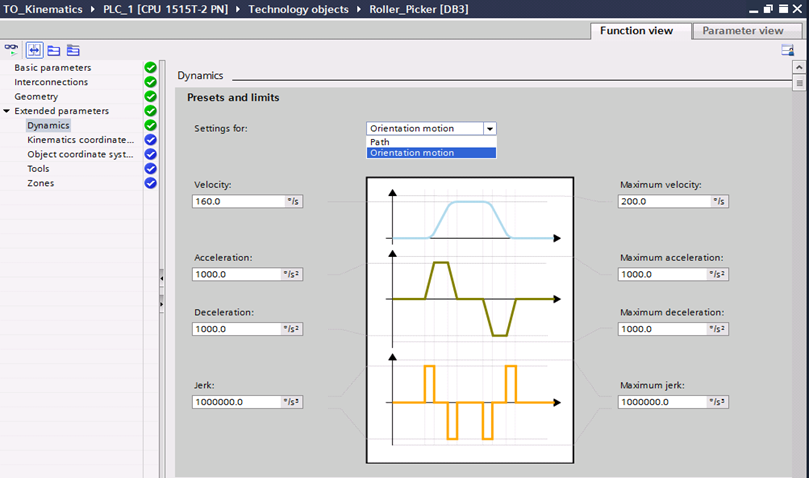
Предварительная настройка динамики, зон, систем координат, инструментов
1. Для динамической характеристики ориентации траектории могут быть заданы значения по умолчанию и предельные параметры
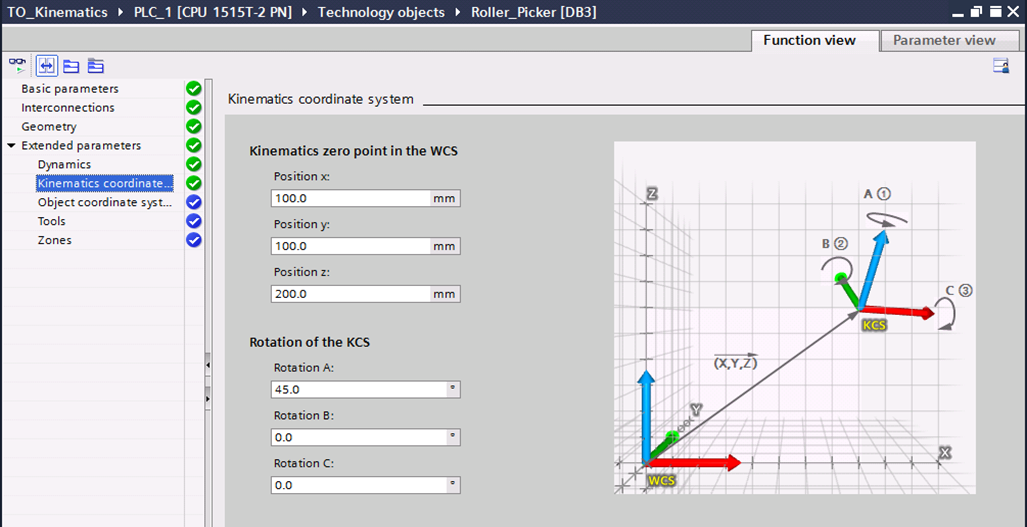
2. Допускается смещение и вращение кинематики в системе координат
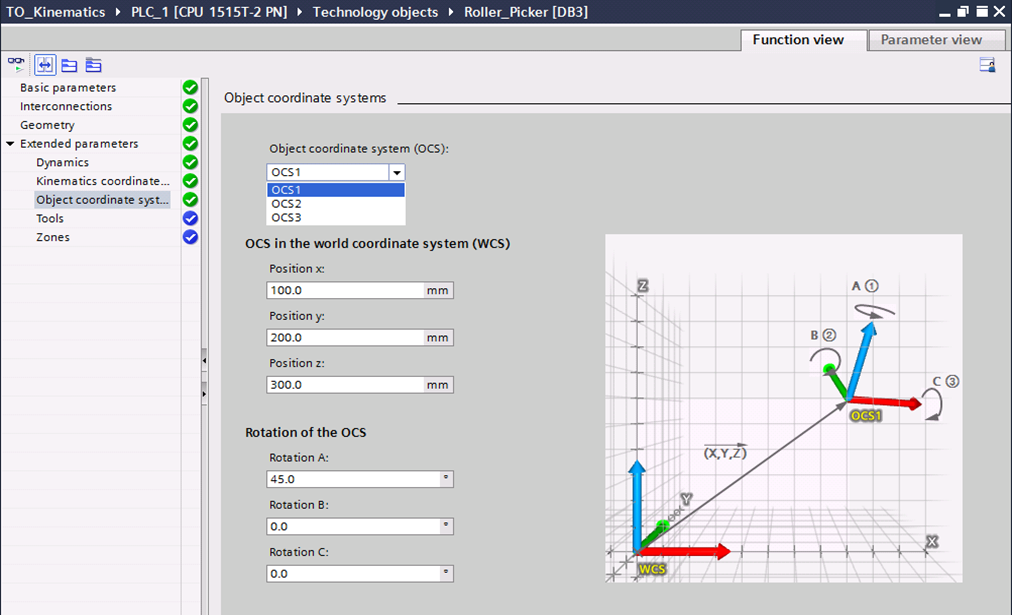
3. Может быть настроено до трех систем координат объекта
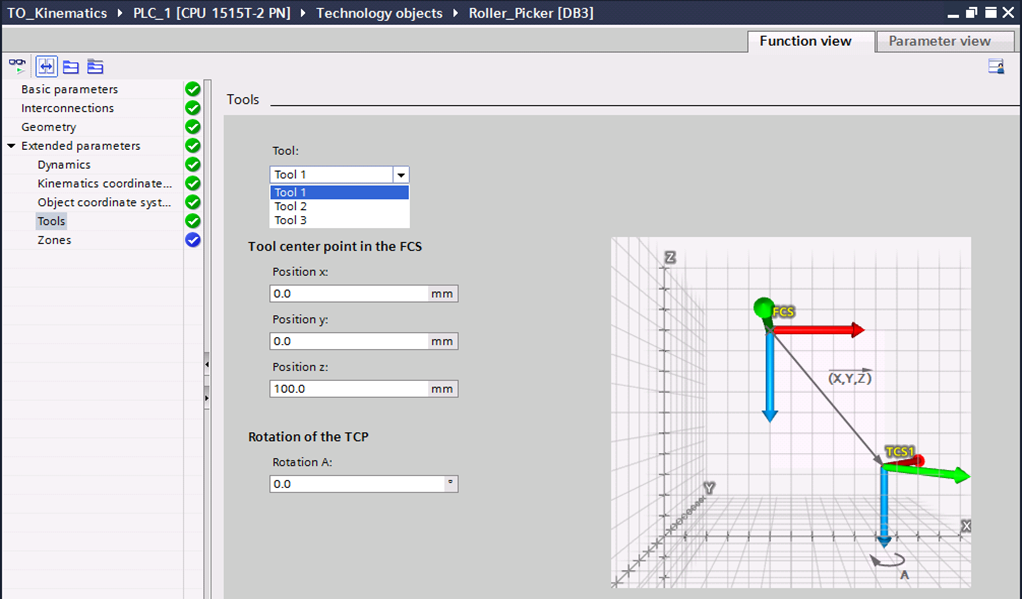
4. Может быть настроено до трех инструментов
5. Трехмерная визуализация для процесса настройки зон
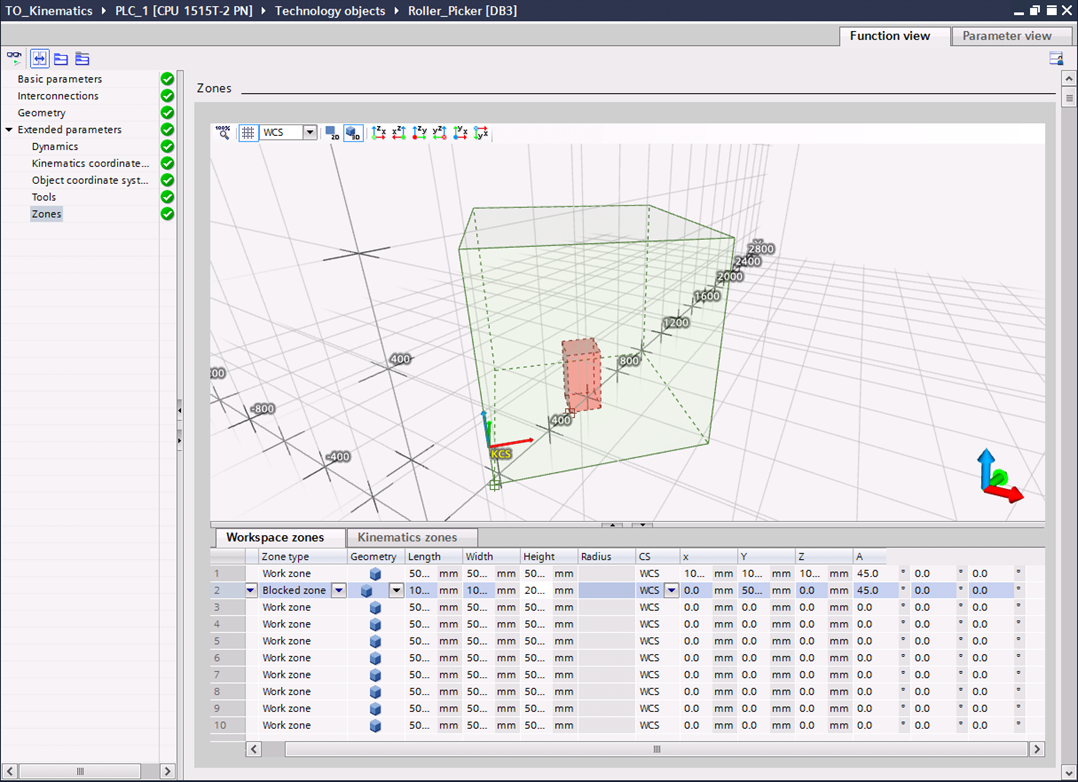
Ввод в эксплуатацию с помощью панели управления
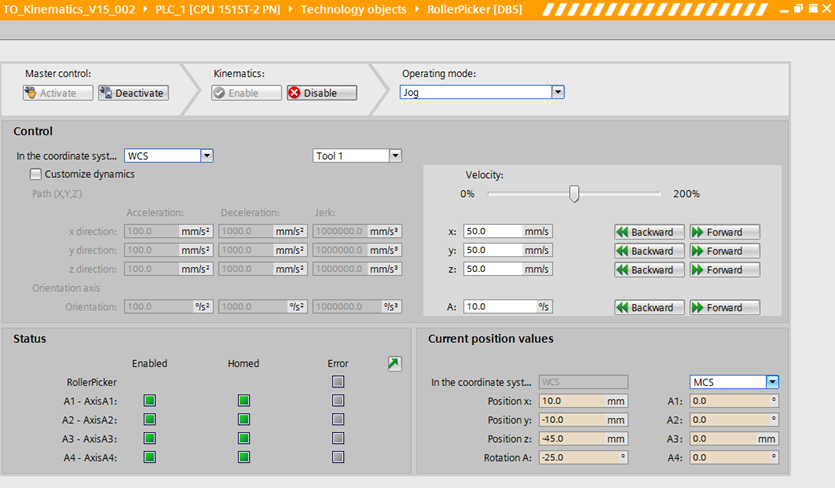
- Удобно: Работа от кнопок и реферирование кинематики на одной панели управления
- Ручное перемещение осей кинематической системы с учетом системы координат и инструмента
- 3D визуализация движения в Трассировке кинематики
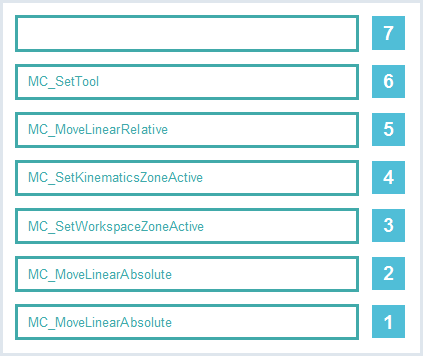
Программирование с функциональными блоками PLCopen
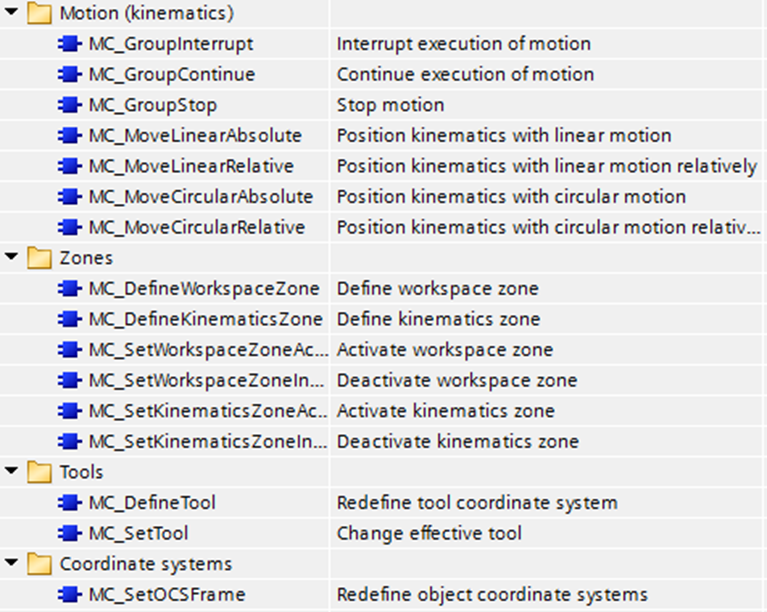
Команды записываются и выполняются по очереди. Динамика планируется по всей цепочке команд. Цепочка может содержать до десяти команд. Число команд в цепочке отображается в TO "Кинематика" (TO-DB).
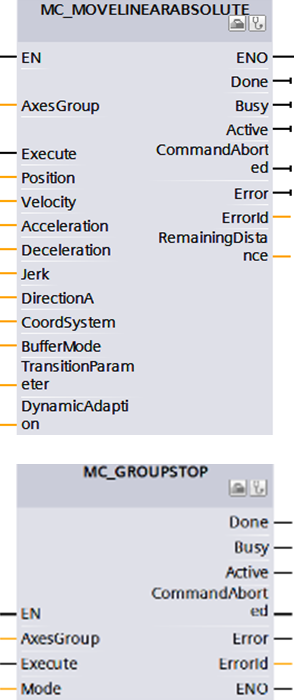
С помощью MC_GroupInterrupt, MC_GroupContinue, MC_GroupStop можно прервать, продолжить или отменить обработку последовательности команд
Пример параметрирования: MC_MoveLinearAbsolute
- Заданная позиция определена как массив из четырех значений LREAL
- Значение в „transition[1]“ это интервал скругления к предыдущей операции движения
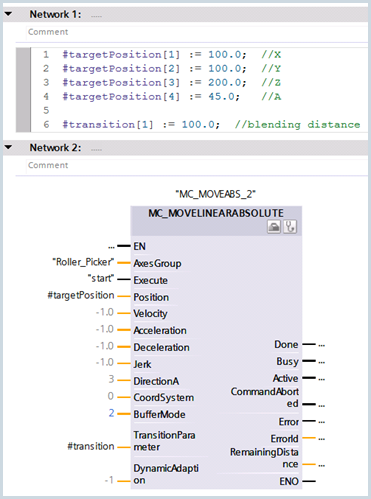
- Вход “Execute” запускает операцию движения для группы осей (TO "Кинематика")
- Динамика может установлена непосредственно на операторе. При входном значении „-1“ используются установки по умолчанию
- Направление движения декартовой ориентации, а также система координат (система координат пространства, система координат объекта) заданной позиции, могут устанавливаться непосредственно командой
- Остаточный путь “RemainingDistance” движения доступен как выход блока
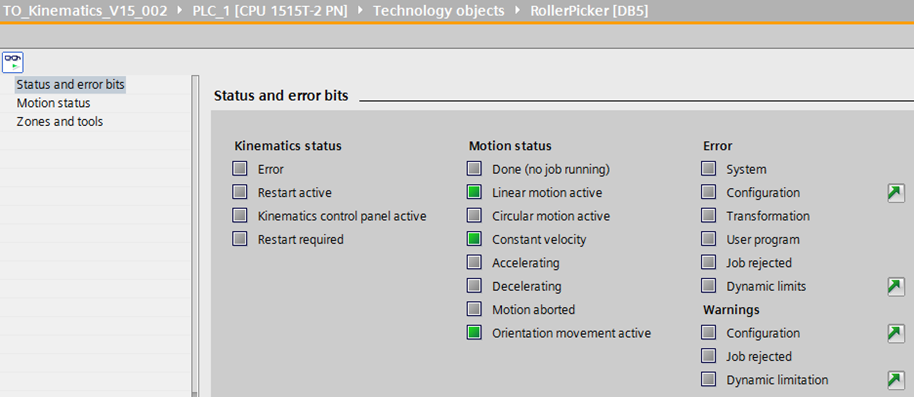
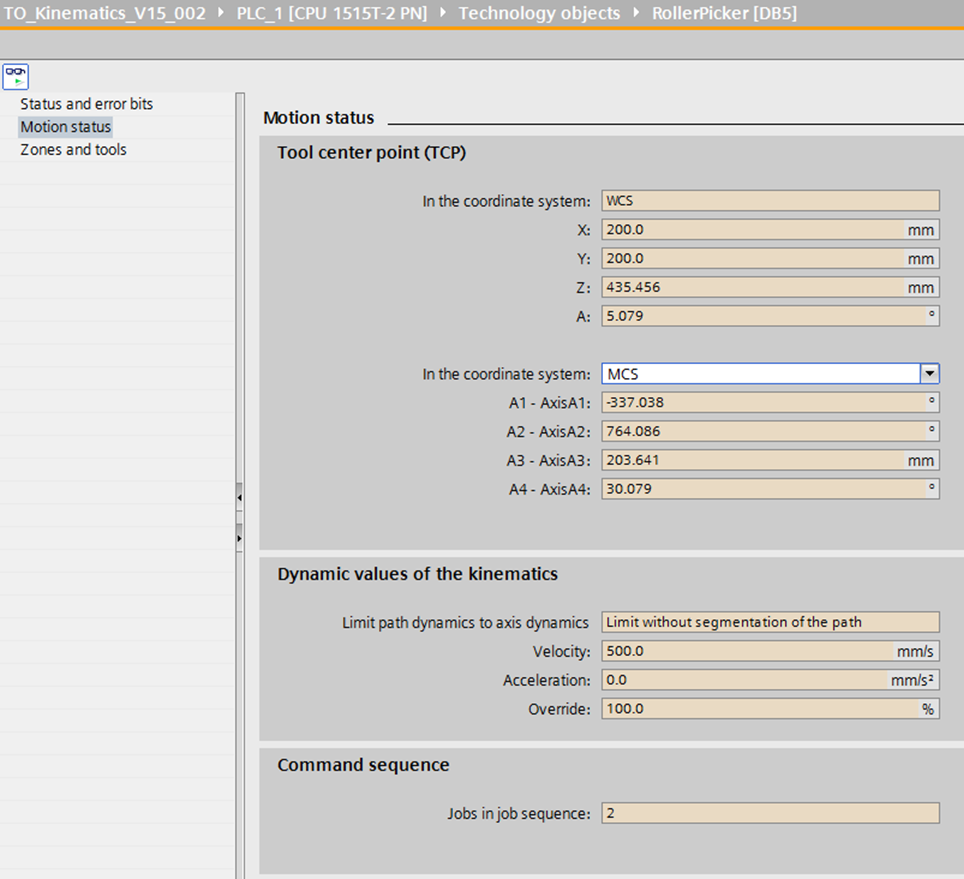
Обширные функции диагностики
Интегрированная в TIA Portal интерактивная диагностика TO "Кинематика"
- биты состояния и ошибок
- состояние движения
- состояние зон и инструментов
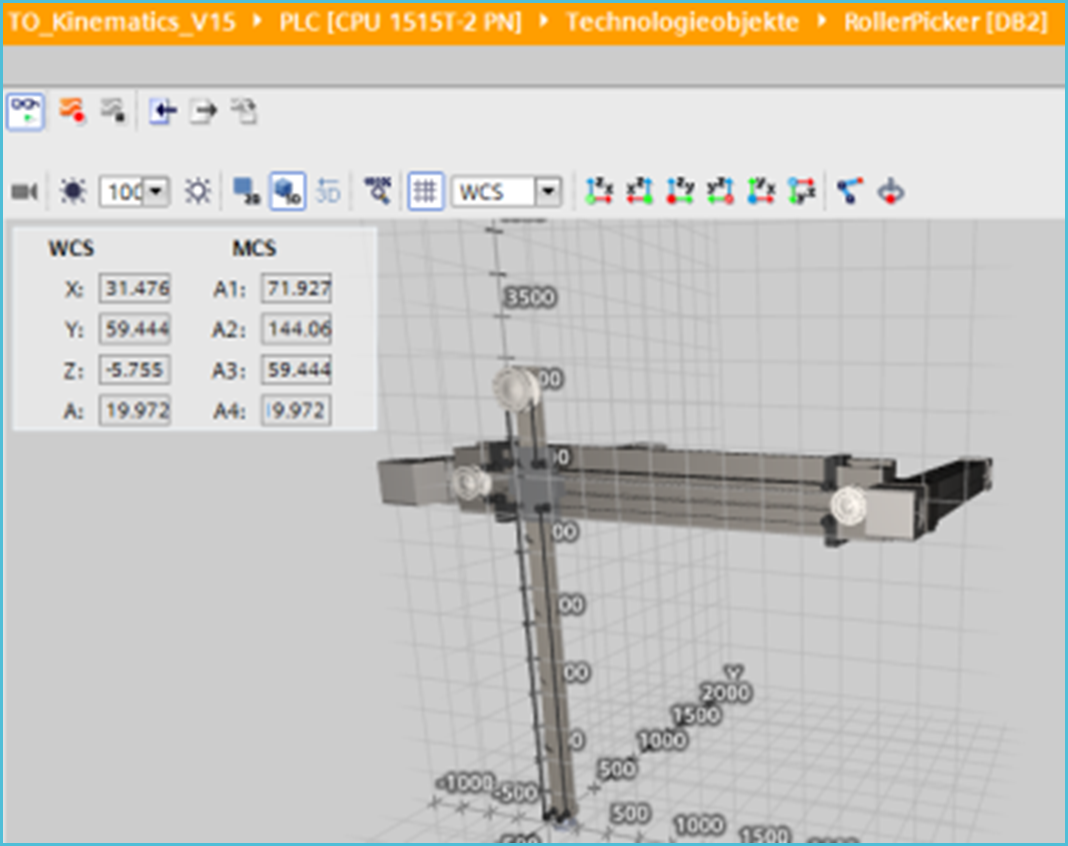
Трассировка кинематики – 3D визуализация и запись движений
3D визуализация сконфигурированной кинематики, запись движения и отображение светящимся следом.

Компания Промэнерго Автоматика является авторизованным партнером Siemens


Компания Промэнерго Автоматика выполняет работы по проектированию, изготовлению, программированию и пуско-наладке автоматизированных систем управления технологическими процессами и систем энергораспределения.

Поддерживаем на складе преобразователи частоты мощностью от 0,4 до 560 кВт




Все самое свежее о семинарах, обучениях, web-тренингах и новостях из мира АСУТП
Не допускается полное или частичное копирование материалов данного сайта без письменного разрешения владельца. Данный сайт использует технологию cookie. Оставаясь на сайте Вы подтверждаете свое согласие с использованием cookie. Правовая информация: Согласие пользователя на обработку персональных данных, Политика конфиденциальности и обработки персональных данных. На сайте указаны розничные цены без НДС. Для получения скидки обращайтесь в отдел продаж.
© ПРОМЭНЕРГО АВТОМАТИКА, 2001—2026. Все права защищены законодательством РФ.
Адрес офиса: Москва, ул. Скотопрогонная, д. 27/26, строение 1
{{ quickBuyNote }}